Moon Magazine JAXA Feature
ローバーは、月面の足である
月面ローバーとは、月面を移動する探査車です。 しかし、それを単なる「車」と考えると本質を見誤ります。 月面ローバーは、探査機の足であり、目であり、手であり、時に実験室でもあります。 走ることで場所を変え、カメラで地形を読み、センサーで物質を測り、掘削装置で地下へ触れる。 月面における知識は、移動によって広がります。
月面は均一ではありません。 明るい高地、暗い月の海、クレーター縁、レゴリス、岩塊、斜面、永久影、長期日照地帯。 どこに何があるかを知るには、一点の着陸だけでは足りません。 ローバーがあることで、月面は点ではなく線になり、やがて面になります。
ここに、ローバーの本質があります。 着陸機は月面の一点を得る。 ローバーは、その一点から世界を広げる。 月を活動圏として考えるなら、ローバーは不可欠です。 月へ降りる技術の次に、月で移動する技術が必要になるのは自然なことなのです。
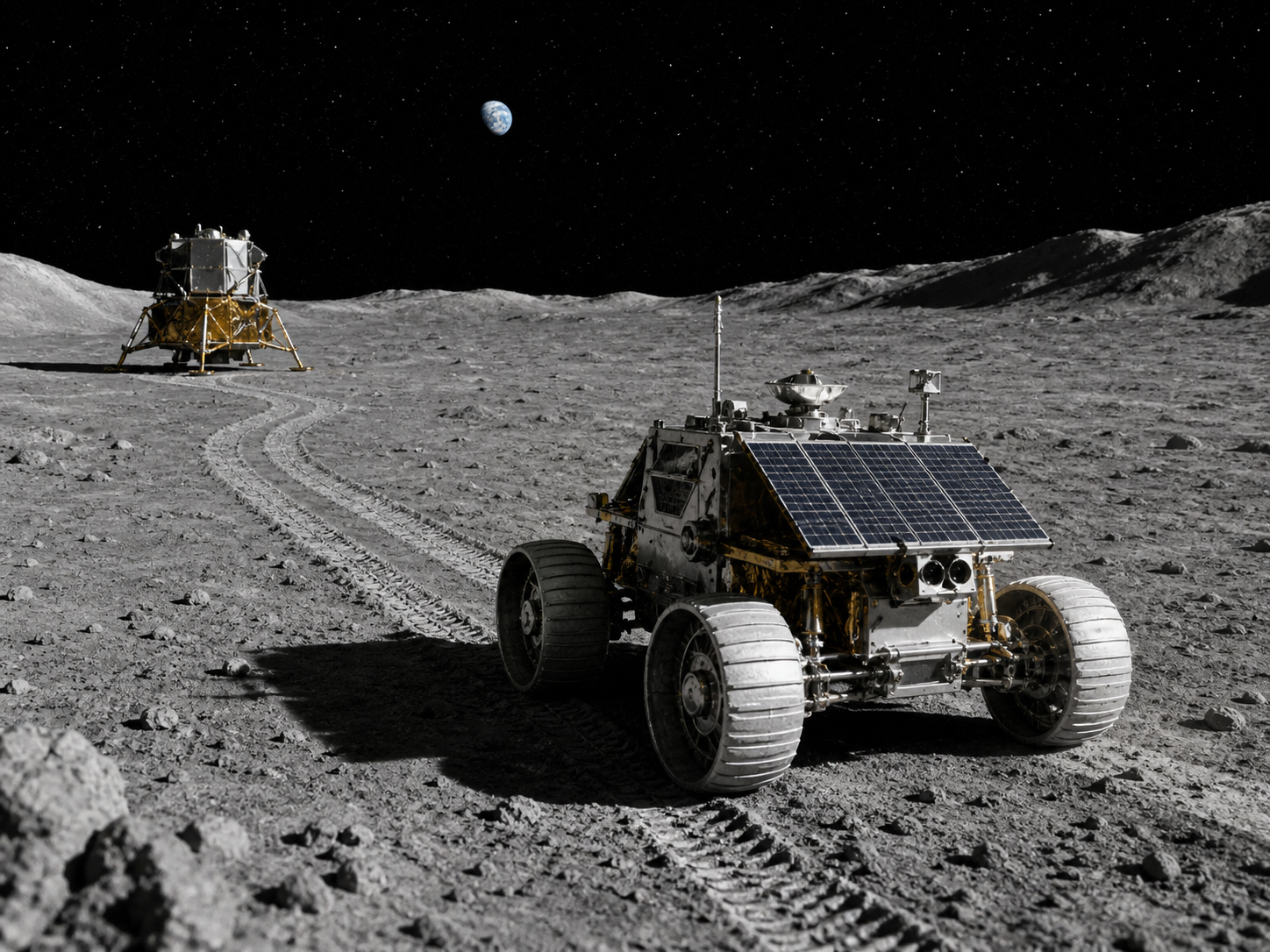
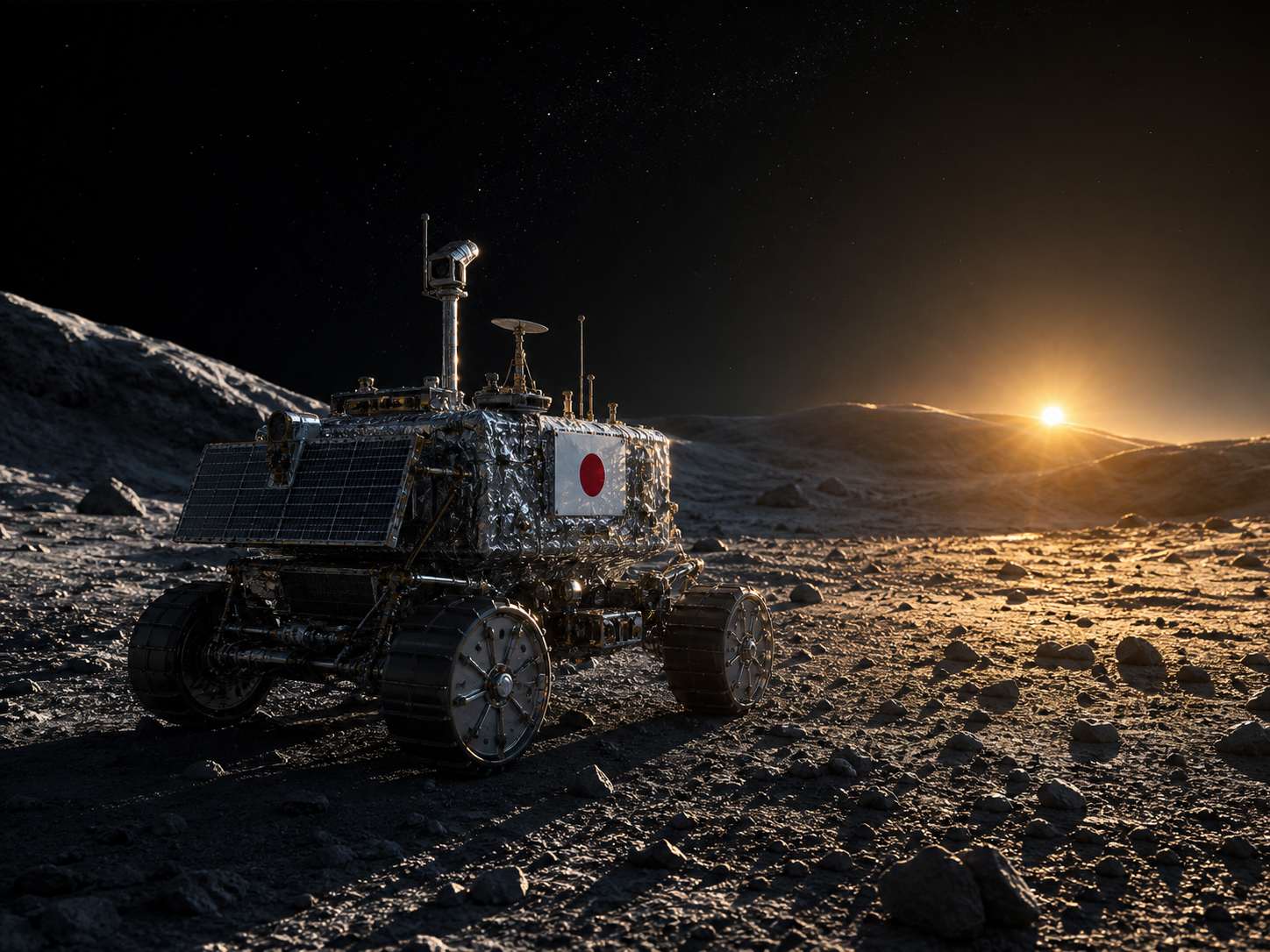
LUPEXローバー — 月の南極で水を探す日本の足
日本の月面ローバーを語るうえで、まず重要なのがLUPEXローバーです。 LUPEXは、月の南極域で水資源を調べるJAXAとISROを中心とした国際協働ミッションです。 JAXAは、月の水資源が将来の持続的な宇宙探査活動に利用可能か判断するために、 水の量と質、濃集原理を調べることを目的としています。 ([humans-in-space.jaxa.jp](https://humans-in-space.jaxa.jp/en/biz-lab/tech/lupex/?utm_source=chatgpt.com))
このミッションでローバーが重要なのは、月の水が一か所に均一にあるわけではないからです。 月の南極域では、長期日照地帯と永久影、クレーター縁、斜面、地下構造が複雑に入り組みます。 水の可能性が高い場所を識別し、複数の地点を比較し、必要に応じて掘削して試料を調べる。 そのためには、動ける探査機が必要です。
JAXAの公式説明では、LUPEXはローバーによって月面を移動しながら観測機器でデータを取得し、 複数地点で掘削、レゴリス採取、水の量や分布、形態などを調べる計画です。 これは、月面で走る研究室と言ってよい。 LUPEXローバーは、日本が月の南極で水を読むための足なのです。
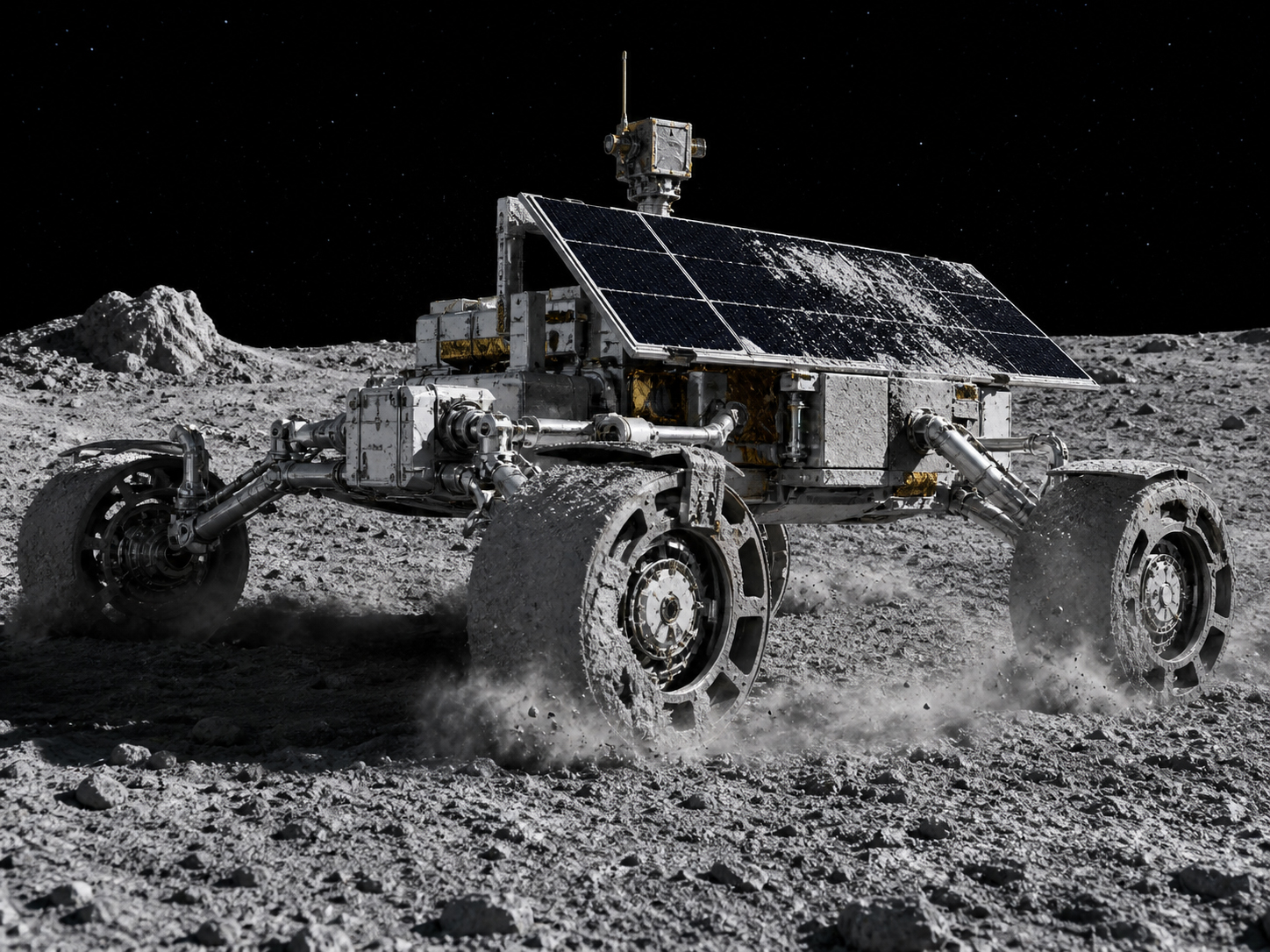
月面で走ることの難しさ
地球で車を走らせることと、月面でローバーを走らせることはまったく違います。 月の重力は地球の約六分の一です。 大気はほとんどなく、温度差は激しい。 レゴリスは細かく、車輪や機構に入り込みやすい。 岩や斜面、クレーター縁、暗い影があり、GPSも道路もありません。
低重力は、単純に走りやすいという意味ではありません。 車輪が地面を押す力、滑り、沈み込み、跳ね、姿勢安定、登坂能力。 すべてが地球とは異なります。 ローバーは、軽くなりすぎてもグリップを失い、重くなりすぎても輸送が難しくなる。 月面移動は、質量、車輪、サスペンション、制御、電力の複雑なバランスです。
さらに、月面では修理が簡単ではありません。 無人ローバーであれば遠隔運用に頼るしかなく、有人ローバーでも予備部品や作業環境は限られます。 月面ローバーには、地球の車以上の信頼性が求められます。 日本のモビリティ技術が月で問われるのは、ここです。

走るだけでは足りない — 掘るローバー
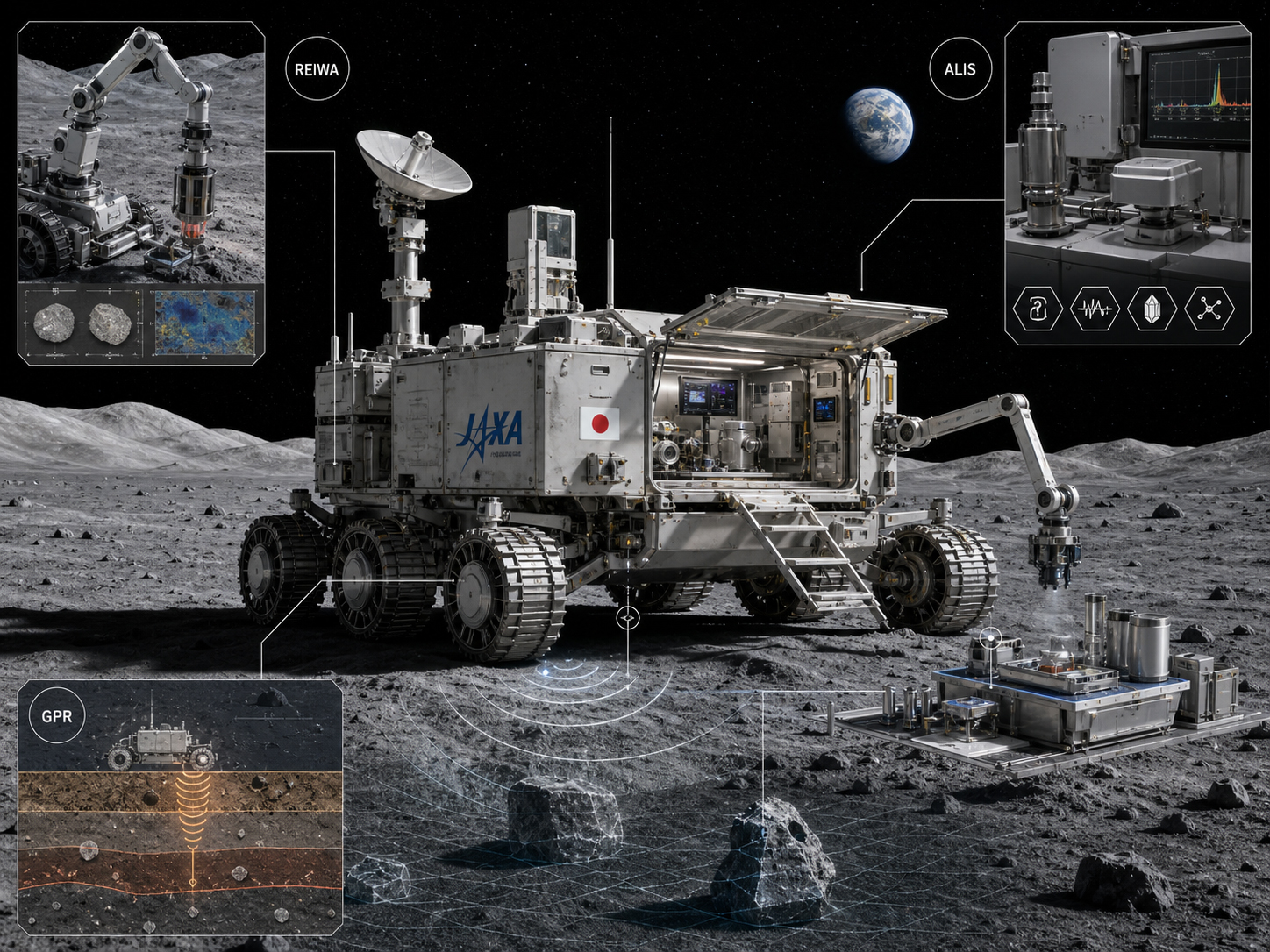
月の南極で水を調べるには、ローバーは走るだけでは足りません。 掘る必要があります。 表面の観測だけでは、水がどの深さに、どのような状態で存在するかは十分にわからないからです。 LUPEXでは、表層から地下1.5メートルまでの掘削・試料採取を行い、加熱による揮発性物質の分析を行う流れが示されています。 ([humans-in-space.jaxa.jp](https://humans-in-space.jaxa.jp/en/biz-lab/tech/lupex/?utm_source=chatgpt.com))
月面で掘ることは、地球で土を掘ることとは違います。 レゴリスは乾いて細かく、真空中では粉塵の挙動も異なります。 掘削時に反力をどう受けるか、低重力下でローバー本体が動かないようにどう固定するか、 試料をどう採取し、分析機器へどう渡すか。 掘削は、月面ローバーにとって「手」の技術です。
ローバーが走るだけなら、それは移動観測です。 掘ることができれば、地下へアクセスできます。 月の水は、表面に見えるとは限りません。 月面ローバーが未来の資源探査で重要になるのは、走る足と掘る手を同時に持つ必要があるからです。
越夜 — 月の夜を越える技術
月面ローバーにとって、越夜は大きな課題です。 月の夜は長く、極端に低温になります。 太陽電池に頼る場合、長い夜のあいだ電力を得られません。 電子機器、バッテリー、機械部品、センサー、駆動系を低温から守り、再び活動できる状態で朝を迎える必要があります。
JAXAはLUPEXについて、将来の月面活動に必要な「移動」「越夜」「掘削」などの重力天体表面探査技術の獲得も目指すと説明しています。 この三語は非常に重い。 月面で長く活動するには、走るだけでなく、夜を越え、地下へ触れる必要があるからです。 ([humans-in-space.jaxa.jp](https://humans-in-space.jaxa.jp/en/biz-lab/tech/lupex/?utm_source=chatgpt.com))
越夜は、単なる耐久試験ではありません。 月面活動が一日限りの実験で終わるのか、継続的な活動になるのかを分ける境目です。 月の夜を越える技術は、未来の月面基地、ローバー、観測装置すべてに関わります。 月で働くとは、夜を越えることでもあるのです。
ローバーは走る実験室である
LUPEXローバーには、水資源分析計REIWA、近赤外画像分光装置ALIS、中性子検出器、地中レーダ、表層分圧計、中間赤外画像分光装置など、多様な観測機器が搭載される予定です。 これは、ローバーが単なる移動車両ではなく、走る実験室であることを示しています。
表面を見る。 地下を見る。 水素を探る。 試料を掘る。 加熱して揮発成分を測る。 分光で鉱物や水の特徴を読む。 ローバーは、月面の場所を変えながら、複数の方法で同じ問いに迫ります。 水はあるのか。どの状態か。どれほどあるのか。
月の水探査では、単一のセンサーだけに頼ることは危険です。 複数の観測方法を重ね、現地でのグラウンドトルースを得ることが重要です。 ローバーが移動しながら多層的に測ることで、月の南極の複雑な環境を立体的に理解できます。
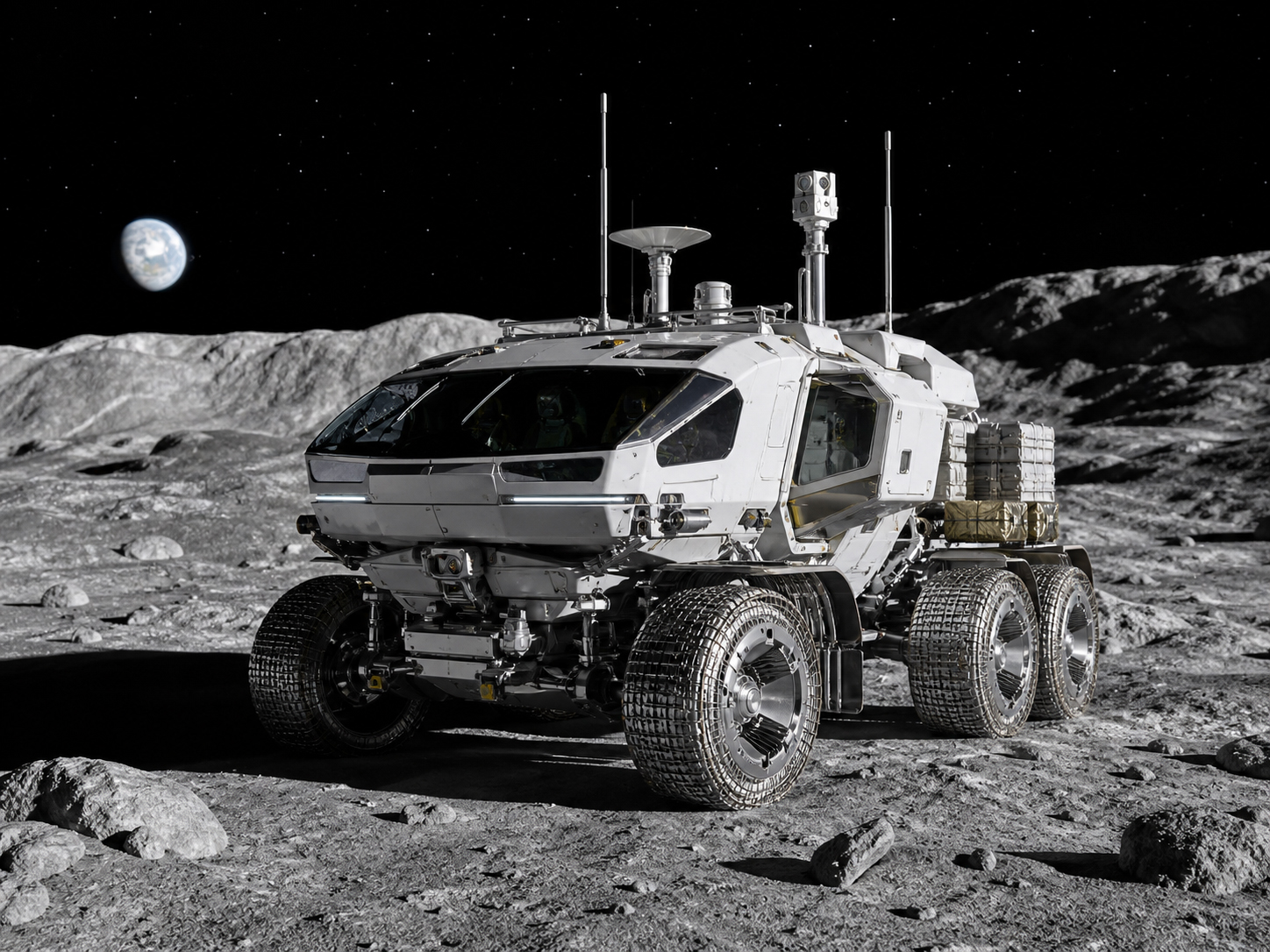
有人与圧ローバー — 月で人間が移動し、暮らすために
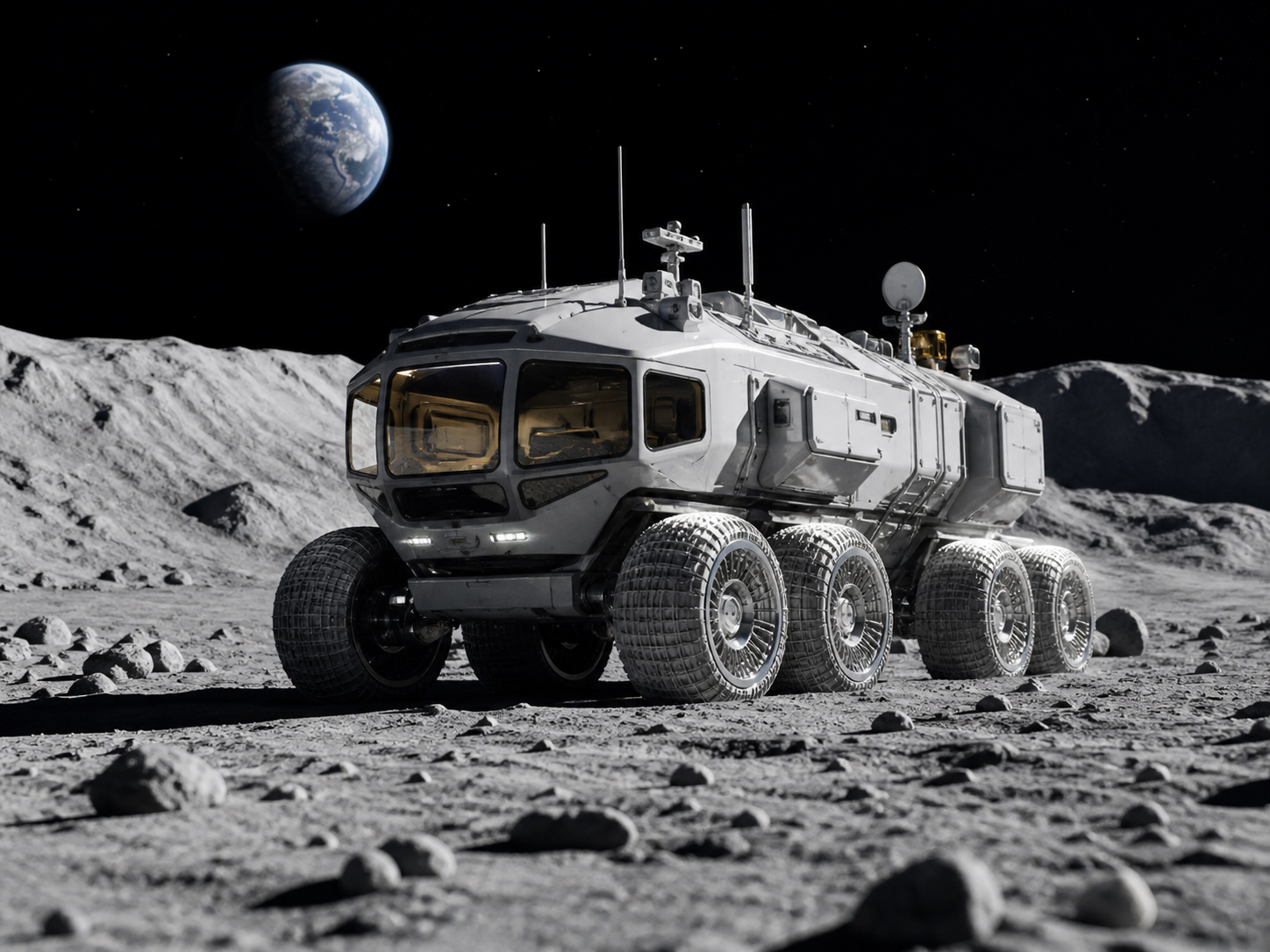
無人ローバーの先にあるのが、有人与圧ローバーです。 JAXAとToyotaは、有人与圧ローバーの共同研究を進め、2020年にその愛称を「LUNAR CRUISER」と発表しました。 JAXAとToyotaは2019年6月13日に共同研究契約を締結し、2020年度には各技術要素の試作部品やプロトタイプローバー製作に取り組むことが示されました。 ([global.jaxa.jp](https://global.jaxa.jp/press/2020/08/20200828-1_e.html?utm_source=chatgpt.com))
有人与圧ローバーは、単なる月面車ではありません。 与圧された室内空間を持ち、宇宙飛行士が宇宙服を着続けずに車内で移動・滞在できるようにする移動居住空間です。 NASAも与圧ローバーについて、月面で宇宙飛行士が長距離を移動し、車内で生活しながら科学研究や探査活動を行うための mobile habitat として位置づけています。 ([nasa.gov](https://www.nasa.gov/suits-and-rovers/pressurized-rover/?utm_source=chatgpt.com))
これは月面活動の考え方を大きく変えます。 宇宙飛行士が基地の周辺だけを歩くのではなく、ローバーに乗って遠くへ行き、車内で休み、作業し、睡眠を取り、再び移動する。 月面ローバーは、移動手段から移動基地へ進化します。
LUNAR CRUISER — 日本のモビリティが月へ行く
LUNAR CRUISERという名前は、ToyotaのLand Cruiserを想起させます。 Toyotaは、JAXAと共同で有人与圧ローバー、LUNAR CRUISERの開発に取り組んでいると説明しています。 その理念には、過酷な環境で人を安全に運ぶモビリティの思想があります。 月面は、地球上のどの道よりも厳しい道です。
ToyotaはLUNAR CRUISERについて、JAXAと2019年から共同研究を行っており、 月面探査の課題に挑む有人与圧ローバーとして紹介しています。 2026年時点でも、宇宙関連展示などでLUNAR CRUISERの取り組みを紹介しており、 開発経験や技術は地球と宇宙のよりよいモビリティにも貢献するとしています。 ([global.toyota](https://global.toyota/en/mobility/technology/lunarcruiser/index.html?utm_source=chatgpt.com))
LUNAR CRUISERの意義は、日本の自動車技術がそのまま月へ行くという単純な話ではありません。 地球の車と月のローバーは、環境が違いすぎます。 しかし、信頼性、安全性、エネルギー管理、過酷地形での移動、人間を守る空間設計。 これらは、地球のモビリティから月面モビリティへ持ち込める思想です。
アルテミス時代の移動手段
有人与圧ローバーは、アルテミス時代の月面活動において重要な役割を担います。 月面基地や着陸地点から遠く離れた場所へ行くには、徒歩の船外活動だけでは限界があります。 宇宙服を着た状態での移動は疲労が大きく、活動時間も限られます。 与圧ローバーがあれば、宇宙飛行士はより長距離を移動し、より広い範囲で科学活動を行うことができます。
NASAは、与圧ローバーが基地から離れた場所で宇宙飛行士の住居となり、 より長距離を移動しながら科学研究や探査活動を行う能力を大きく広げると説明しています。 また、無人時には遠隔運用も可能とされ、有人ミッションの合間にも科学調査や次の着陸地点への配置ができる可能性があります。 ([nasa.gov](https://www.nasa.gov/suits-and-rovers/pressurized-rover/?utm_source=chatgpt.com))
これは、月面活動が「着陸して周辺を歩く」段階から、 「広域を移動し、複数地点を調査し、車内で生活しながら働く」段階へ進むことを意味します。 ローバーは、月面活動の面積を拡大します。 月の地図を、徒歩圏から移動圏へ広げるのです。
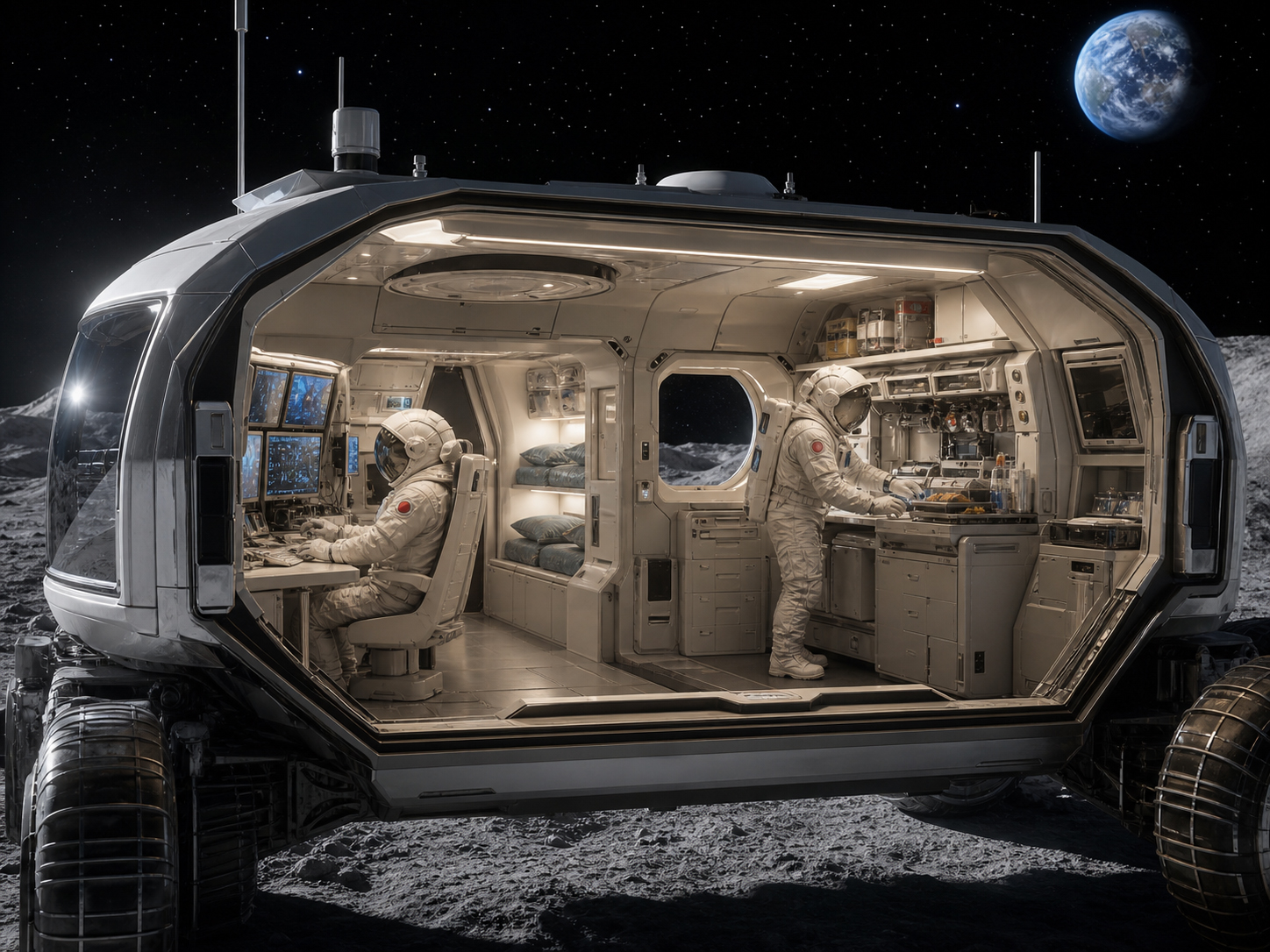
与圧とは何を変えるのか
与圧ローバーの核心は、車内に人間が生きられる圧力環境を持つことです。 月面には地球のような大気がありません。 宇宙飛行士が外へ出るには宇宙服が必要です。 しかし宇宙服で長時間移動し続けることには限界があります。
与圧ローバーなら、宇宙飛行士は車内で宇宙服を脱ぎ、休息し、作業し、移動できます。 これは単なる快適性の問題ではありません。 作業効率、安全性、健康管理、活動範囲、緊急時対応を大きく変えます。 車両が移動手段であると同時に、生命維持空間になるのです。
JAXAは2024年、与圧ローバーを、宇宙飛行士が宇宙服なしで月面を移動できる世界初の月面ローバーシステムとして説明し、 将来の月探査における人間の活動領域を大きく広げるものと位置づけています。 これは、日本の月面活動への貢献を考えるうえで非常に重要です。 ([humans-in-space.jaxa.jp](https://humans-in-space.jaxa.jp/en/news/detail/003924.html?utm_source=chatgpt.com))
無人運用と有人運用のあいだ
将来の与圧ローバーは、有人時だけでなく無人時にも重要な役割を持つ可能性があります。 NASAは、与圧ローバーが遠隔操作可能であり、次の有人着陸地点へ移動させたり、 有人ミッションの合間に科学研究を行ったりできると説明しています。 ([nasa.gov](https://www.nasa.gov/suits-and-rovers/pressurized-rover/?utm_source=chatgpt.com))
これは非常に重要な発想です。 月面活動は、人間が常にいるわけではありません。 有人ミッションと有人ミッションの間にも、機械は働ける。 ローバーが無人で移動し、観測し、次の地点へ準備されていれば、有人活動の効率は大きく高まります。
無人ローバーと有人与圧ローバーは、完全に別の世界ではありません。 無人運用で培った遠隔制御、自律移動、電力管理、通信、地形判断の技術は、有人ローバーにもつながります。 LUPEXのような無人探査とLUNAR CRUISERのような有人移動居住技術は、月面モビリティの連続した発展段階なのです。
月面ローバーとエネルギー
月面ローバーの活動を支えるのはエネルギーです。 無人ローバーであっても、移動、通信、観測、掘削、熱制御には電力が必要です。 有人与圧ローバーであれば、生命維持、空調、居住空間の維持も加わります。 月面では、電力は移動距離そのものを決めます。
月の南極では、長期日照地帯が注目されます。 太陽光を長く得られる場所があれば、ローバーや基地の電力確保に有利です。 一方で、水氷が期待される永久影は太陽光が届きにくい。 つまり、ローバーは「電力が得られる場所」と「調べたい場所」をつなぐ役割を持つことになります。
月面モビリティは、単なる車輪の問題ではありません。 電力、熱、地形、通信、目的地、帰還性。 これらがすべて結びついて、移動可能性が決まります。 月で走るとは、エネルギーの使い方を設計することでもあるのです。
月の砂 — レゴリスという敵
月面ローバーにとって、レゴリスは大きな課題です。 月の表面を覆う細かな粉塵は、長い時間にわたる微小隕石衝突で岩石が砕かれてできたものです。 粒子は鋭く、帯電しやすく、機械の隙間やシール、可動部に入り込む可能性があります。
アポロ時代にも、月の塵は大きな問題でした。 宇宙服に付着し、機器に入り込み、視界や作業性に影響しました。 月面ローバーが長期間活動するなら、粉塵対策は避けられません。 車輪、軸受け、シール、放熱面、太陽電池、センサー。 あらゆる場所でレゴリス対策が必要になります。
日本のローバー技術が月で試されるのは、過酷な地形だけではありません。 目に見えにくい細かな粉塵、温度差、真空、低重力。 それらに対して、どれだけ信頼性のある機械をつくれるか。 月の砂は、小さな敵ですが、月面活動の大きな制約です。
人間を運ぶという責任
有人与圧ローバーでは、技術の意味がさらに重くなります。 そこには人間が乗るからです。 月面で人間を遠くへ運ぶということは、単に移動距離を伸ばすだけではありません。 命を守る空間を、月面の厳しい環境の中で維持するということです。
酸素、圧力、温度、二酸化炭素除去、放射線、通信、緊急時の退避、故障時の対応。 与圧ローバーは、車であると同時に、生命維持システムです。 そして、もし基地から遠く離れて活動するなら、その信頼性は絶対的に重要になります。
月面モビリティにおける日本の役割は、ここで深く問われます。 人を安全に運ぶ技術。 過酷な環境で壊れにくい技術。 限られた資源で長く働く技術。 地球の自動車産業が培ってきた思想は、月面で新しい形を必要とするでしょう。
Toyotaの参加が意味するもの
JAXAとToyotaの協力は、月面ローバーに対する日本の特徴をよく示しています。 宇宙機関だけではなく、地球上で長くモビリティを作ってきた企業が関わる。 これは、月面活動が宇宙工学だけでなく、移動、居住、安全、耐久性、ユーザー体験の問題でもあることを示しています。
ToyotaはLUNAR CRUISERの開発について、月探査の課題に挑む有人与圧ローバーとして紹介し、 その開発経験が地球と宇宙のよりよいモビリティに貢献するとしています。 月面技術と地球技術は、一方通行ではありません。 月で鍛えた技術が、地球のモビリティにも返ってくる可能性があります。 ([global.toyota](https://global.toyota/en/mobility/technology/lunarcruiser/index.html?utm_source=chatgpt.com))
月面で走る車を考えることは、地球の車を問い直すことでもあります。 エネルギー効率、耐久性、軽量化、遠隔運用、自律性、乗員保護。 極限環境で必要な技術は、地球上の災害対応、遠隔地移動、持続可能なモビリティにもヒントを与えるでしょう。
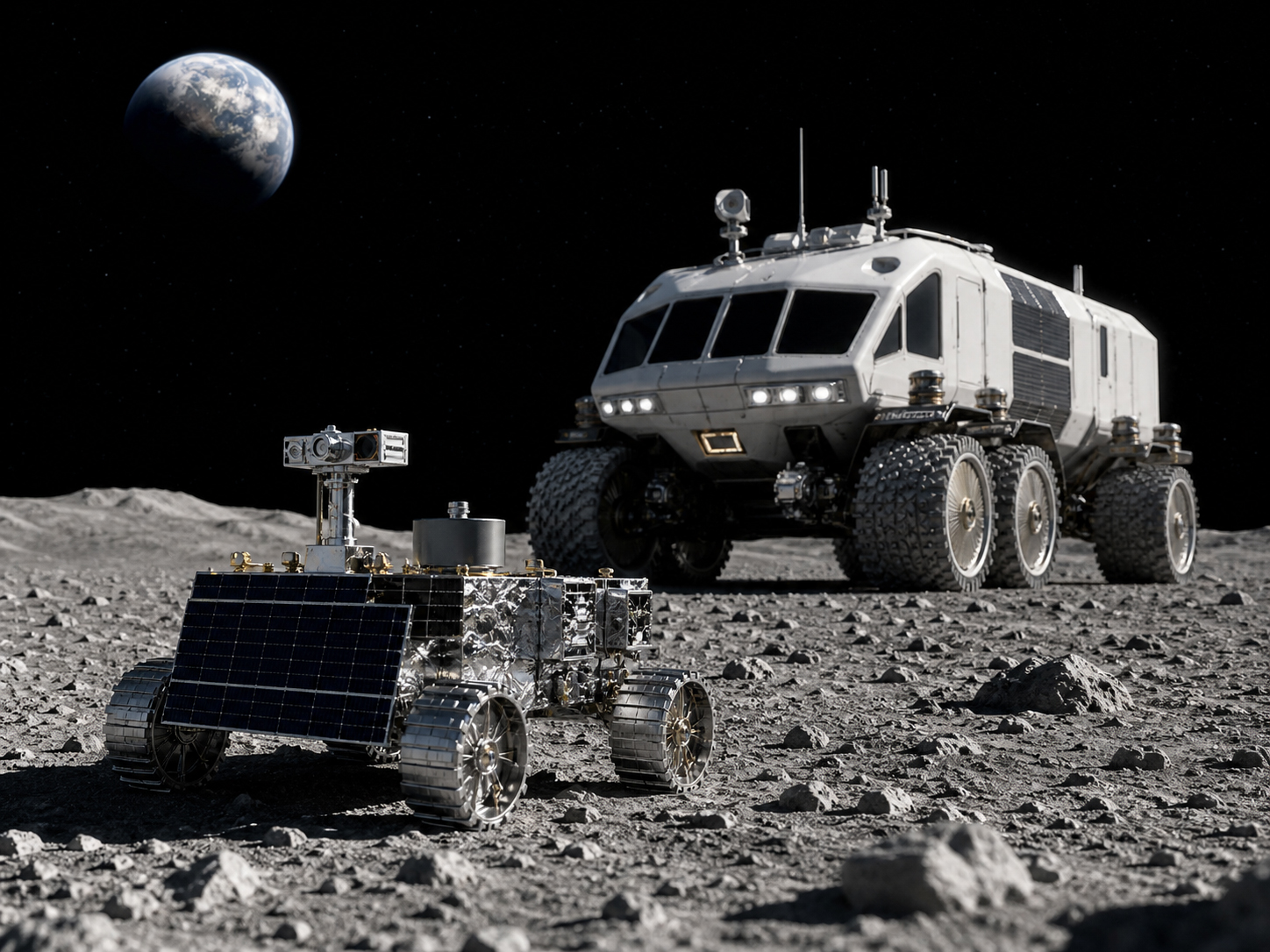
LUPEXからLUNAR CRUISERへ
LUPEXローバーとLUNAR CRUISERは、規模も目的も異なります。 LUPEXは無人の科学探査ローバーであり、月の南極で水資源を調べる。 LUNAR CRUISERは有人与圧ローバーであり、宇宙飛行士が月面で長距離を移動し、車内で生活しながら活動する未来を目指す。
しかし両者は連続しています。 月面で移動する。 電力を管理する。 地形を読む。 通信する。 長く動く。 月面環境に耐える。 これらは無人ローバーにも有人ローバーにも共通する課題です。
日本の月面ローバー技術は、まず無人探査で月面を測り、次に有人活動で人間の行動範囲を広げる方向へ進んでいくでしょう。 見る、降りる、走る、掘る、住む。 月探査の動詞が増えるほど、ローバーの重要性は増していきます。
ローバーが科学を広げる
月面ローバーが科学にもたらす最大の利点は、比較できることです。 一か所だけを測るのではなく、複数地点を測る。 高地と低地、日照地帯と影、クレーター縁と平坦地、表層と地下。 場所を変えながら同じ機器で測ることで、地域差が見えてきます。
月の南極では、地形差が特に重要です。 わずかな高度差や影の入り方によって、温度や水の保存条件が変わる可能性があります。 ローバーがなければ、その差を細かく追うことは困難です。 移動は、科学の解像度を上げるのです。
さらに、有人与圧ローバーが実現すれば、宇宙飛行士はより広い範囲で地質調査を行えます。 人間の判断力と移動基地としてのローバーが組み合わさることで、月面科学は新しい段階へ進むでしょう。
月見の国が、月で車を走らせる
Moon.co.jpにとって、日本の月面ローバーは単なる技術ページではありません。 月見の国が、月で車を走らせる。 その言葉には、文化と技術の長い距離が詰まっています。 かつて日本人は、月を見上げ、団子を供え、兎を見ました。 いま日本は、月面でローバーを走らせ、水を探し、将来は人間を運ぼうとしています。
この変化は、月を遠いままにしない日本の姿勢として読めます。 月を暦にした。 月を和歌にした。 月を月見の行事にした。 そして今、月を移動可能な地形として扱おうとしている。 月のまなざしは、空から地面へ降りてきました。
ただし、月面ローバーの未来に必要なのは、単に走ることではありません。 月を傷つけすぎず、科学的価値を守り、国際協力の中で透明性を持ち、人間の活動範囲を広げることです。 月見の静けさを忘れないローバー。 そんな言い方は詩的すぎるかもしれませんが、日本の月面モビリティには、その品格を期待したい。
未来の月面道路は、まだない
月には道路がありません。 標識も信号もありません。 整備された路面もありません。 未来の月面ローバーは、道なき道を進むことになります。 その意味で、月面ローバーは、車というより探検のためのシステムです。
しかし、ローバーが何度も同じ場所を走り、基地と探査地点を結び、電力拠点と水氷候補地をつなぐようになれば、 月面にもやがて「道」に近い概念が生まれるかもしれません。 それは舗装道路ではなく、移動経路、通信経路、安全圏、充電地点、避難地点のネットワークです。
日本の月面ローバーは、その最初の線を引く可能性があります。 月面の点と点をつなぐ。 着陸地点と観測地点をつなぐ。 人間とロボットの活動範囲をつなぐ。 月で走ることは、月面に人類の活動圏を描くことなのです。
結び — 月で走ることは、月を暮らしへ近づけること
月面ローバーは、月を変えます。 着陸機だけの月は、一点の月です。 ローバーの月は、移動する月です。 有人与圧ローバーの月は、生活しながら移動する月です。 そこでは、月は眺める対象から、働く場所へ変わります。
日本の月面ローバーには、二つの未来があります。 一つは、LUPEXのように無人で走り、掘り、水を測る未来。 もう一つは、LUNAR CRUISERのように人間を守り、遠くへ運び、月面での活動範囲を広げる未来。 どちらも、日本が月面時代に果たしうる大きな役割です。
月見の国が、月で車を走らせる。 それは奇妙に聞こえるかもしれません。 しかし、月を遠いままにしないという点では、月見もローバーも同じ線の上にあります。 月を迎える。月を読む。月へ降りる。月で走る。 日本の月の物語は、いま移動を始めています。
Next Reading